- Home
- 大学, 理窓 2020年5月号
- 自然、環境、宇宙そして人、共に響き合う理工学部へ
自然、環境、宇宙そして人、共に響き合う理工学部へ
- 2020/5/8
- 大学, 理窓 2020年5月号

木村教授とスペースコロニー・デモモジュール
【受賞歴】
2020年1月8日 宇宙科学研究所賞 受賞
(国立研究開発法人 宇宙航空研究開発機構)
「超小型カメラ技術による深宇宙ミッションへの貢献」
【研究テーマ】
本研究室では、実際に人工衛星や宇宙機に搭載するカメラやロボットの開発を通じて、自律分散制御技術、システム工学、ヒューマンインターフェース技術等の研究を進め、生物の自律性に学びつつ、宇宙システムやロボットなど高度な自律制御システムの実現を目指しています。基礎的な制御工学から、ものづくりまで、幅広く研究を進めています。
1.宇宙システムの自律制御技術に関する研究
「モジュール型マニピュレータの開発とロボット制御技術の研究」 生物はけがをしても生きていくために動き続けます。こうした生物のもつしたたかさを実現することができれば、予想もできないような状況に適応できるロボットを実現することができます。木村はこれまで、故障などへの柔軟な対応などロボットの分散知能化について研究を行い、故障にも柔軟に適応できるモジュールロボットを開発してきました。このような研究を拡張し、自分自身を修理し再構成させるロボットや、環境に柔軟に対応するロボット技術について研究を行います。
2.民生用部品を活用した衛星搭載機器の開発
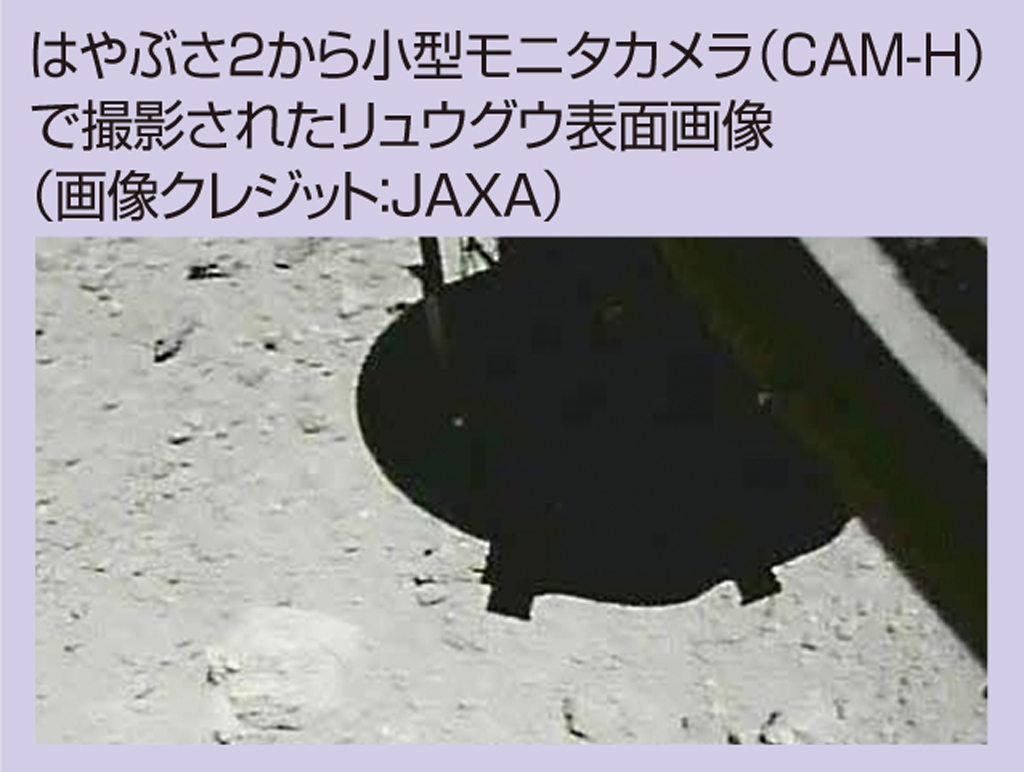
「宇宙用超小型カメラに関する研究」 宇宙開発において「見る」と言うことは本質的でとても重要です。宇宙用のカメラは、星図をもとにして衛星の姿勢を決定するスターセンサーや、周囲の衛星の画像を用いて相対的な位置を計測し、自律的なランデブーを実現するランデブーシステムなどにも応用することができます。近年デジタルカメラなど、撮像素子や演算素子の開発が盛んに進められています。
こうした進歩を宇宙システムに応用しますと、非常に高機能で低コストな超小型カメラを実現する事ができます。木村研究室では宇宙航空研究開発機構などと協力して宇宙用超小型カメラの開発を行っています。
 研究例
研究例
⃝はやぶさ2搭載カメラ システム
⃝IKAROS搭載カメラ システム
⃝宇宙ステーション補給 機「こうのとり」搭載カ メラシステム
3.スペースコロニー研究センター
東京理科大学は文部科学省による「私立大学研究ブランディング事業」に採択され、スペースコロニー研究センターを発足しました。この研究センターでは主として地上でのアプリケーションを目的として研究が進められている、優れた要素技術を宇宙へのアプリケーションにつなげることで、今後大きく広がっていく宇宙での居住に応用していくことを計画しています。木村研究室はこれまで様々なミッションに参画することで培ってきた、地上技術を宇宙技術に生かす技術を活用して、積極的に中核としての役割を果たしていくことを計画しています。分野を超えた融合が、新しい宇宙開発の可能性を広げる原動力となります。
4.研究室活動
| 毎年木村研の4年生の多くは、夏休みにARLISSという競技会に参加するため、アメリカのブラックロック砂漠に行きます。 毎年9月に開催される小型人工衛星(CANSAT)の打ち上げ競技会です。2019年は目標地点へのゴールを達成し、ARLISS Accuracy Award部門で準優勝に輝きました。 |


[卒業生コメント]
中村 将大 (株)NTTドコモ
(理工・ 電気電子情報2016)
研究室では、人工衛星搭載ソフトウェアの研究開発に携わりました。現在の業務と分野は異なりますが、ハードウェアも含め幅広く開発に携わった経験は、技術的理解の支えとなっています。
またCanSatや宇宙プロジェクトの経験は、周囲を巻き込みながらシステム開発業務を遂行する上での基礎となっています。
関連記事